Have you ever experienced this innate "superpower"? The first time you step into an unfamiliar campus or shopping mall, without making any deliberate effort to memorize, just by glancing at a few landmarks and walking along a few paths, your brain can automatically construct a clear spatial layout— allowing you to flexibly avoid obstacles and reach your destination with ease. This instinct, shared by humans and animals alike, is known as spatial intelligence. How to enable robots to go beyond mere visual recognition and acquire the ability to understand the physical world like humans, reason autonomously, and take action— has long been one of the ultimate challenges in embodied artificial intelligence.
Now, a research team from NPU Human-Machine-Object Fusion and Crowd Intelligence Computing team has come up with a brand-new answer.
Recently, a review paper titled "Bio-inspired Cognitive Navigation for Embodied Agents", authored by Professor Yu Zhiwen and Professor Guo Bin from the School of Computer Science at NPU , has been accepted by Nature Reviews: Electrical Engineering, a Nature sub-journal. All co-authors are affiliated with the Key Laboratory of Human-Machine-Object Fusion and Crowd Intelligence Computing, Ministry of Education, NPU. Professor Guo Bin and Yu Zhiwen serve as co-corresponding authors. Drawing inspiration from the biological mechanisms of animal navigation, the team systematically reviews the emerging field of "cognitive navigation" and innovatively proposes a cognitive navigation framework for embodied agents. The framework aims to equip machines with capabilities that go beyond simple movement, enabling them—much like animals—to understand space, leverage prior experience, and make flexible decisions in unknown environments.
The "Confusion" of Machines:Navigators Trapped in Data
For a long time, robotic navigation has been somewhat clumsy. Machines follow a fixed pipeline of "mapping – localization – planning – control." This type of navigation works well enough in highly structured, stable environments such as warehouses or inspection sites. However, once placed in an open, dynamic, and unknown real world, its fatal flaws begin to show. First poor generalization — when the environment changes, the robot may become instantly disoriented because its map no longer matches reality. Second, to maintain high-precision maps, robots require enormous computational power and energy. This leads to high energy consumption, slow response times, and a tendency to get "confused." As a result, they struggle to cope with the complex and ever-changing real world.
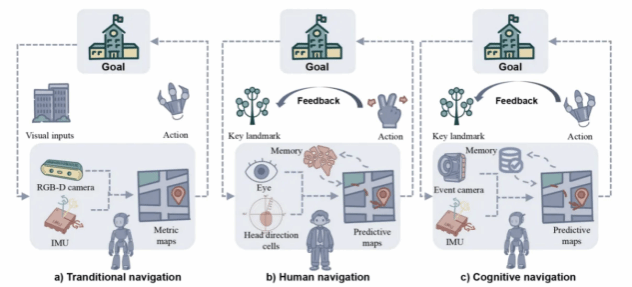
From Traditional Navigation to Brain-Inspired Cognitive Navigation
In contrast, animals rely on a "cognitive map" — a spatial ability that involves thinking, abstraction, and prediction. Simply put, it follows a "three no's, one new" principle: No need to remember irrelevant details — only capture key landmarks and retain high-value experiences. No focus solely on the present — they can anticipate what comes next. When encountering a new environment, they directly reuse past experiences. In short, animals find their way not because they have good memory, but because they can summarize, associate, and adapt. Inspired by the mechanisms of animal navigation, the Human-Machine-Object Fusion and Crowd Intelligence Computing team has embarked on a bionic exploration. They are investigating whether the abilities animals demonstrate during navigation — landmark recognition, experiential memory, and flexible decision-making — can be systematically distilled and deconstructed, and then transformed into a learnable and computable robotic navigation framework.
Equipping Robots with a "Biological Brain"
Since following a rigid map-based approach leads to dead ends, the team has deconstructed animal navigation mechanisms from the perspective of cognitive neuroscience and proposed an innovative brain-inspired embodied cognitive navigation framework. In simple terms, the team is attempting to equip robots with a "biological brain" — enabling them to no longer rely on external map data, but instead understand space through internal cognitive mechanisms. This allows robots to perceive their surroundings in real time and flexibly avoid obstacles within dynamic environments. The key breakthrough of this framework is the transition from "passive execution" to "active cognition ." Its core can be summarized by four keywords: Multimodal perception
Predictive representation, Memory reuse, Hierarchical planning.
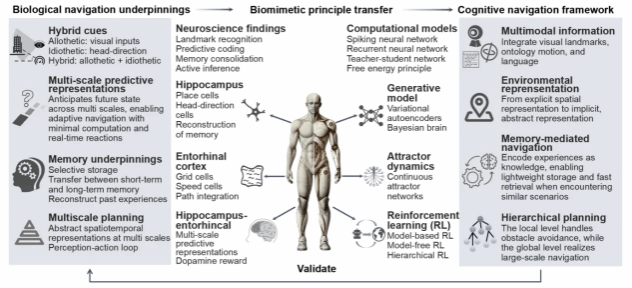
Robot Brain-Inspired Cognitive Navigation Framework Based on Biological Navigation Mechanisms
Multimodal perception breaks the limitation of traditional robots that "rely solely on vision." By integrating motion, posture, and environmental signals, robots can more accurately determine their own state within the environment. Predictive representation goes beyond knowing "where I am" — it enables robots to anticipate "what lies ahead" and respond proactively. Memory reuse solves the problem of robots struggling to adapt to unfamiliar environments. By transforming past experiences into transferable knowledge, robots can quickly adapt to new scenarios and apply lessons learned in a flexible, generalized manner. Hierarchical planning allows robots to first set a high-level direction, then take smaller, incremental steps. From now on, robotic navigation is no longer just about "executing commands" — it is truly about "walking with thought."
Opening a New Frontier for Embodied Intelligence
From "executing commands" to "navigating flexibly" — this shift is not merely an optimization of technical parameters, but a profound paradigm shift. For a long time, complex scenarios such as home care for the elderly, mine operations, and warehouse logistics have shared common characteristics: they are dynamic, unknown, and full of uncertainties. These have remained the "last mile" challenge for the deployment of robotic technologies. The emergence of the brain-inspired embodied navigation framework endows robots with the ability to perceive, decide, and act autonomously in unknown and dynamic environments — much like living creatures. It has successfully opened up a critical path for large-scale application of embodied intelligence, granting robots the potential to truly step into complex real-world settings. More importantly, this marks the gradual unfolding of a brand-new technological route that integrates artificial intelligence and neuroscience.
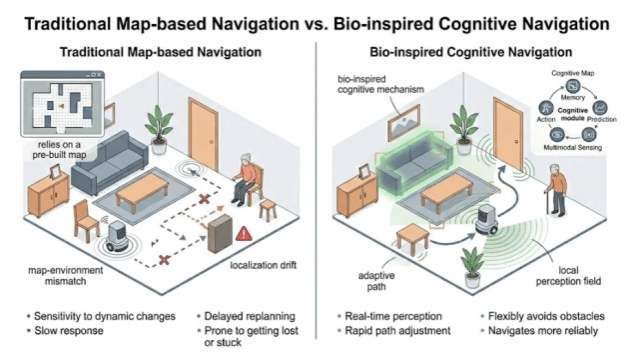
From Rigid Map-Following to Flexible Autonomous Navigation

Future Application Scenarios of Brain-Inspired Cognitive Navigation (AI Generated)
This research is supported by the Key Laboratory of Human-Machine-Object Fusion and Crowd Intelligence Computing, Ministry of Education, the Key Laboratory of Intelligent Perception and Computing, Ministry of Industry and Information Technology, and the Shaanxi Provincial Key Laboratory of Embedded Systems Technology. The team has long been engaged in cutting-edge research in fields such as pervasive computing and crowd intelligence, as well as brain-inspired embodied intelligence. In recent years, they have received multiple awards, including the First Prize of the Ministry of Education Natural Science Award and the First Prize of the Shaanxi Provincial Science and Technology Award. They have also received Best Paper Awards at top-tier international conferences such as ACM Ubicomp and ACM SenSys, and are actively engaged in multiple enterprises and research institutes for technology transfer and applied deployment.
(Produced by: Media Office of the NPU Committee of the CPC
Source: School of Computer Science
Copywriter:Wang Cuiping, Zhang Yanan
Editor: Jiang Tianyu
Editor-in-Chief: Zhao Zhen
Reviewers: Li Chunke, Fu Yi
Translators: Lu Ruijin, Mei Leyun)